
We strongly encourage users to use Package manager for sharing their code on Libstock website, because it boosts your efficiency and leaves the end user with no room for error. [more info]

Rating:
Author: Simon Platten
Last Updated: 2014-09-17
Package Version: 1.0.0.0
Example: 1.0.0.0
Category: Communication
Downloaded: 5289 times
Followed by: 1 user
License: MIT license
This project demonstrates a Modbus Master implementation, it has been developed and tested for a P18F45K22 using an EasyPic v7 for testing and written in mikcroC.
Do you want to subscribe in order to receive notifications regarding "Serial Modbus Master" changes.
Do you want to unsubscribe in order to stop receiving notifications regarding "Serial Modbus Master" changes.
Do you want to report abuse regarding "Serial Modbus Master".
| DOWNLOAD LINK | RELATED COMPILER | CONTAINS |
|---|---|---|
| 1346607002_modbus_master_mikroc_pic.zip [163.34KB] | mikroC PRO for PIC |
|

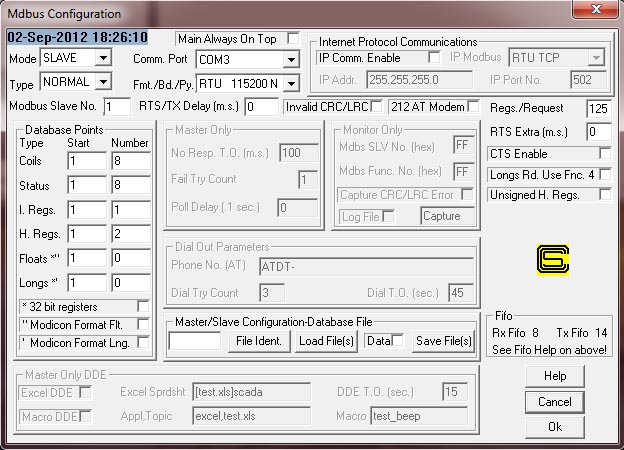
How to configure the Calta Computer Systems Limited modbus simulation tool as a slave project for use with this modbus master.
View full image
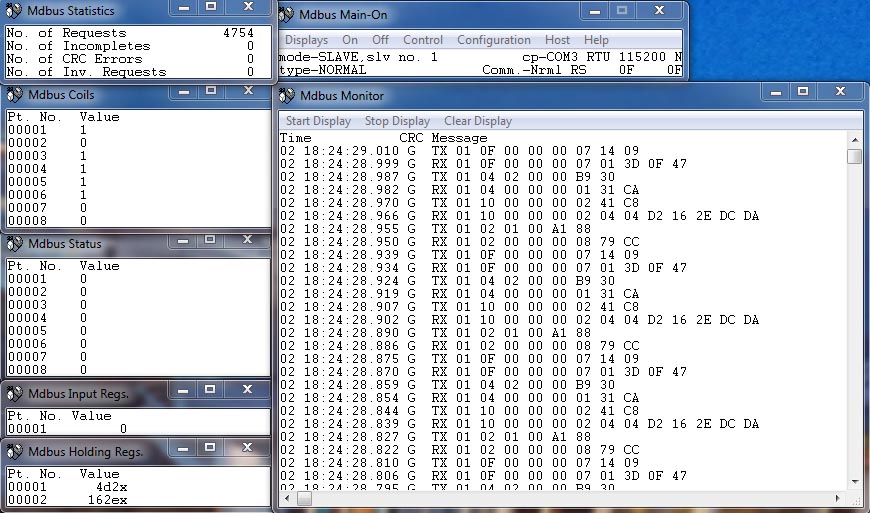
Screen show shows responses to Master implementation.
View full image02/08/2012 Uploaded version 1.00. In this demo the master has been set-up to request the following I/O from a single slave:
Discrete outputs (Coils) x 8 starting at 1
Discrete inputs (Status Inputs) x 8 starting at 1
Holding Registers (16 bit analogue registers) x 2 starting at 1
Input Registers (16 bit analogue input registers) x 1 starting at 1
Supported functions:
01 Read coils
02 Read status inputs
03 Read holding registers
04 Read input registers
05 Force single coil
06 Preset single register
15 Force multiple coils
16 Preset multiple registers
To simulate the write operations, PORT D has been configured as input with buttons 1 to 4 performing the following:
Button 1, writes to a single coil to address 1 (Function 05)
Button 2, writes to 7 coils, starting at address 1 (Function 15), the value written is b111101
Button 3, writes to a single holding register to address 1 (Function 06), value 0xcaca
Button 4, writes to 2 holding registers, starting at address 1 (Function 16), values 0x04d2 and 0x162e.
Summary of usage:
RAM used 1480 bytes 97.7%
ROM used 7454 bytes 22.7%
For Modbus Slave embedded implementation:












{kind=link}
{kind=link}