
We strongly encourage users to use Package manager for sharing their code on Libstock website, because it boosts your efficiency and leaves the end user with no room for error. [more info]

Rating:
Author: v.savic
Last Updated: 2016-02-19
Package Version: 1.0.0.0
Category: Motor Control
Downloaded: 1422 times
Followed by: 1 user
License: MIT license
Embedded robotics project.
Includes:
High level architecture, standard DC and unipolar stepper motors, device drivers, H-Bridge electronics.
Sensors electronics: micro switch, IR, Feedback motor control sensors.
System software - finite state machine.
Platform-Easy 8051 v6 SD Board AT89S8253
Do you want to subscribe in order to receive notifications regarding "Embedded Robotics - Programmable Autonomous Vehicle" changes.
Do you want to unsubscribe in order to stop receiving notifications regarding "Embedded Robotics - Programmable Autonomous Vehicle" changes.
Do you want to report abuse regarding "Embedded Robotics - Programmable Autonomous Vehicle".
| DOWNLOAD LINK | RELATED COMPILER | CONTAINS |
|---|---|---|
| 1365713129_embedded_robotic_mikroc_8051.zip [2.20MB] | mikroC PRO for 8051 |
|

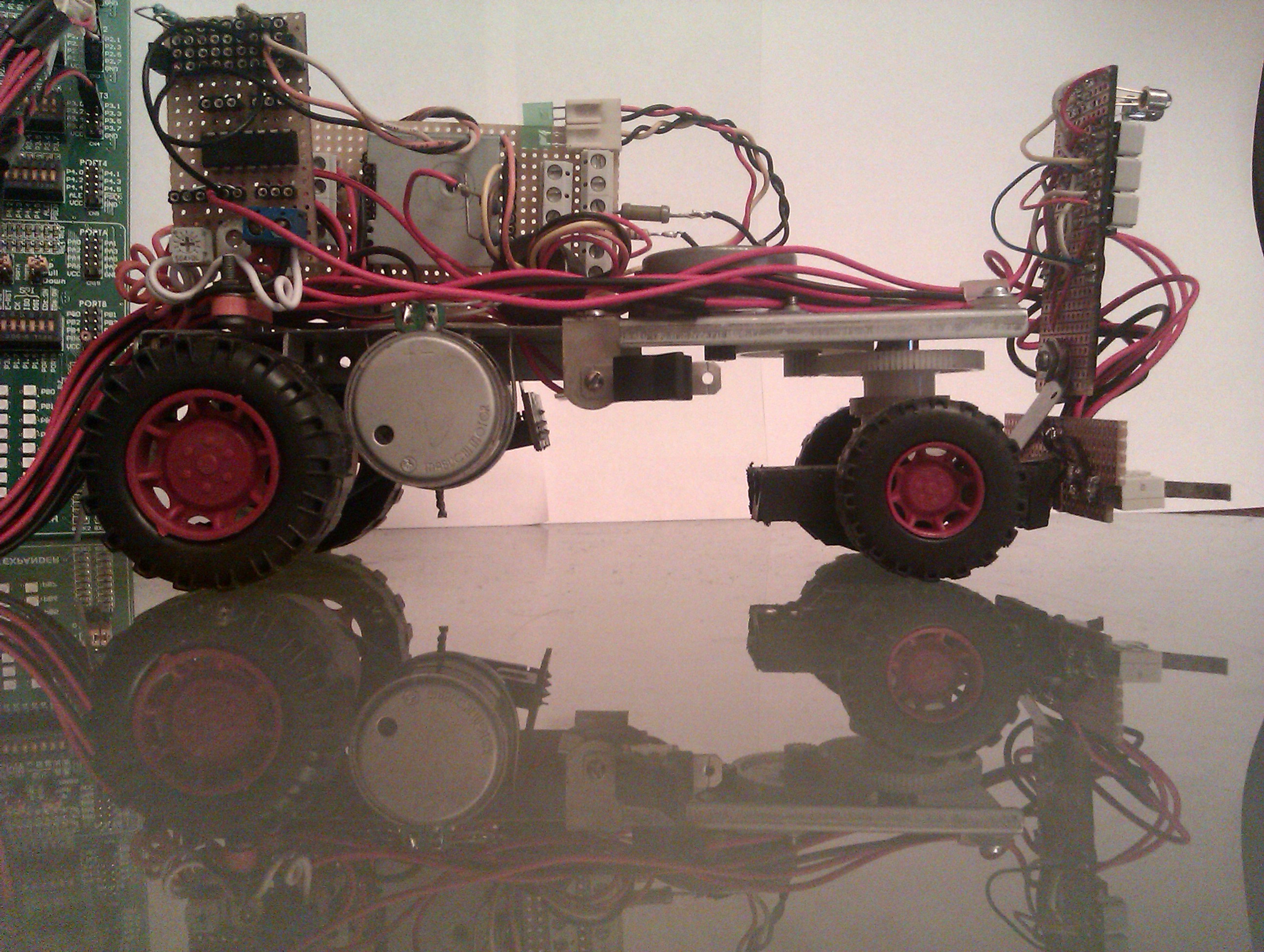
Programmable Autonomous Vehicle - Development phase 1
View full image










Development - Rohm 574 sensor testing. Bumper installed on the motor shaft intersects the light. LM324 IC is used as comparator (A/D convertor). For more details download zip file which contains schematic for Rohm 574 sensor.
Watch on YouTubeBreadboard IR sensor development. Electronic components: LD 271 Infrared LED Transmitter, BPW77NB Silicon NPN Photo transistor, LM324 IC as comparator.
Watch on YouTubeIR sensor based on: LD 271 Infrared LED Transmitter, BPW77NB Silicon NPN Photo transistor, LM324 IC as comparator. To eliminate reflection of light, PCB is covered with black insulation tape. For more details download zip file.
Watch on YouTubeMovement defined by the black path. To enable black track detection, IR sensor is horizontally installed on front wheels construction. Installation was very easy, because all electronics are made on separated PCB.
Watch on YouTubeMovement defined by the black path. To enable black track detection, IR sensor is horizontally installed on front wheels construction. Installation was very easy, because all electronics are made on separated PCB.
Watch on YouTube












{kind=link}